The time has come for me to build a kitted-out, ultra-portable micro quad on a 230mm frame. This quad should be highly acrobatic yet also contain GPS with the ability to also fly autonomously by accessing many different autopilot modes from its flight controller. By hand-selecting each of the components we can keep the price as low as possible while keeping the performance high. Additionally, we would like to keep the weight down so that the quad can stay airborne while hovering for at least 15 minutes (a time that few quadcopters of this size and weight can achieve). We would like to keep the AUW (all up weight) to less than 300g so that we can run this setup using a 2S battery.
Parts
- Ecks 230mm carbon fiber mini frame

- 4 x Hobbyking 6A ESCs

- 4 x Tiger Motor MT1306-10 3100KV

- 2 Pairs x HQ Prop 5x3 Fiberglass Composite Propeller (1 CW Rotation & 1 CCW Rotation)

- Multiwii Pro v2.1 Flight Controller with GPS Module

- Turnigy 2S, 2200 mAh Battery


I have been thoroughly impressed with the frames produced by Ecks for some time now. These are some beautifully artistic and creative frames, including one crafted from mahogany, that are beautiful to behold. While most of Ecks' frames are of the 310mm variety, they also make a 230mm mini. The frame is CNC'd from a 2mm carbon fiber plate is is astonishingly rigid for the fact that it tips the scales at only 71g! Upon closer the tolerances are quite good although not perfect which I am a little surprised by considering the high level of workmanship that appears on their web site. Some of the curved cutout pieces are noticeably non-smooth in parts, but this is just aesthetic and should have no negative impact on performance.
For this build, I have elected to go with Tiger Motors since they are
some of the best in the business.

Indeed, the 1306 motors that I am
using for this project are extremely strong for a high speed 2S motor yet have a
maximum efficiency of 93%. This means that only 7% of the energy it
consumes is converted into heat which is a very small number (most
comparable motors achieve only about 82% maximum efficiency). All of this in a motor they weighs only 11.5g - these guys are tiny! Running these with a 4-inch or 5-inch prop will allow us to run 6A ESCs which are extremely light (and will be made even lighter in the next section).
Assembly
Before assembling the components, the first thing to be done is to prepare the ESCs. First the ESCs are flashed with SimonK firmware which configures the ESC to be better suited to multirotor uses (as opposed to being used for RC planes or cars for which they were initially programmed).
Flashing the ESCs with SimonK


 use any one of the ground pins) to the red and black leads on the ESCs (the thin wires connected to the JST plug which will attach to the receiver). NOTE: that the programmer delivers 5V to the ESC which is fine based on the ESC's specs. According to some reports, if the ESC is powered with only 3.3V during flashing, this can cause errors. The pin setup for the USBasp programmer can be found here. The pads on the ESC are labelled and one simply need wire the contact for each pad to the corresponding pin on the USBasp.
use any one of the ground pins) to the red and black leads on the ESCs (the thin wires connected to the JST plug which will attach to the receiver). NOTE: that the programmer delivers 5V to the ESC which is fine based on the ESC's specs. According to some reports, if the ESC is powered with only 3.3V during flashing, this can cause errors. The pin setup for the USBasp programmer can be found here. The pads on the ESC are labelled and one simply need wire the contact for each pad to the corresponding pin on the USBasp.
 Using this rig, the 4 ESC's were flashed with SimonK by first connecting the power and ground leads and then holding the pins to the pads while running the software flashing tool. The entire process took less than 10 seconds per ESC. Despite some articles that recommend it, the BS.hex firmware DOES NOT WORK with these ESCs. Instead, they were flashed with BSV2014-03-06 from LazyZero's repository. A WORD OF CAUTION: Initially, I had plugged a ribbon cable into the USBasp tool and intended to plug cables to my rig into the other on of the ribbon connector. However, this did not work and when I connected a multimeter to it, I found that the ribbon cable seemed to be doing weird things to the input signals by the time the emerged from the other end of the cable. As a result, I elected to eliminate the ribbon cable and, instead, plug the wires from my rig directly into the pins on the USBasp device.
Using this rig, the 4 ESC's were flashed with SimonK by first connecting the power and ground leads and then holding the pins to the pads while running the software flashing tool. The entire process took less than 10 seconds per ESC. Despite some articles that recommend it, the BS.hex firmware DOES NOT WORK with these ESCs. Instead, they were flashed with BSV2014-03-06 from LazyZero's repository. A WORD OF CAUTION: Initially, I had plugged a ribbon cable into the USBasp tool and intended to plug cables to my rig into the other on of the ribbon connector. However, this did not work and when I connected a multimeter to it, I found that the ribbon cable seemed to be doing weird things to the input signals by the time the emerged from the other end of the cable. As a result, I elected to eliminate the ribbon cable and, instead, plug the wires from my rig directly into the pins on the USBasp device.These ESCs contain battery elimination circuits (BECs). The BEC allows the flight controller (FC) to get its power from the ESC (which in turn is connected to the flight battery). This eliminates the need to carry a separate battery for the FC. However, the FC needs only one of the ESCs to provide power; it does not need to be powered for all four ESCs simultaneously. Some FC's will simply take the power for the first ESC and will ignore the others while for some FCs, having all the ESCs providing power can damage the FC. So, it is a good idea to remove/disconnect the power lead from three of the ESCs. Since I would like to eliminate any excess weight, I removed both the power and the ground lead wires from 3 of the 4 ESCs leaving just the signal wire (ie the wire that controls the speed of the motor) connected. Additionally, the motor lead wires were trimmed very short as these will be mounted close to the motors and so the wires were way longer than needed. It might not sound like much, but as a result of simply trimming these wires, the total mass of the 4 ESCs was reduced by 6g from 24g to 18g. This is the attention to detail that one needs to have towards a minimalistic assembly if one is to keep the weight to a minimum.
Mounting the Motors








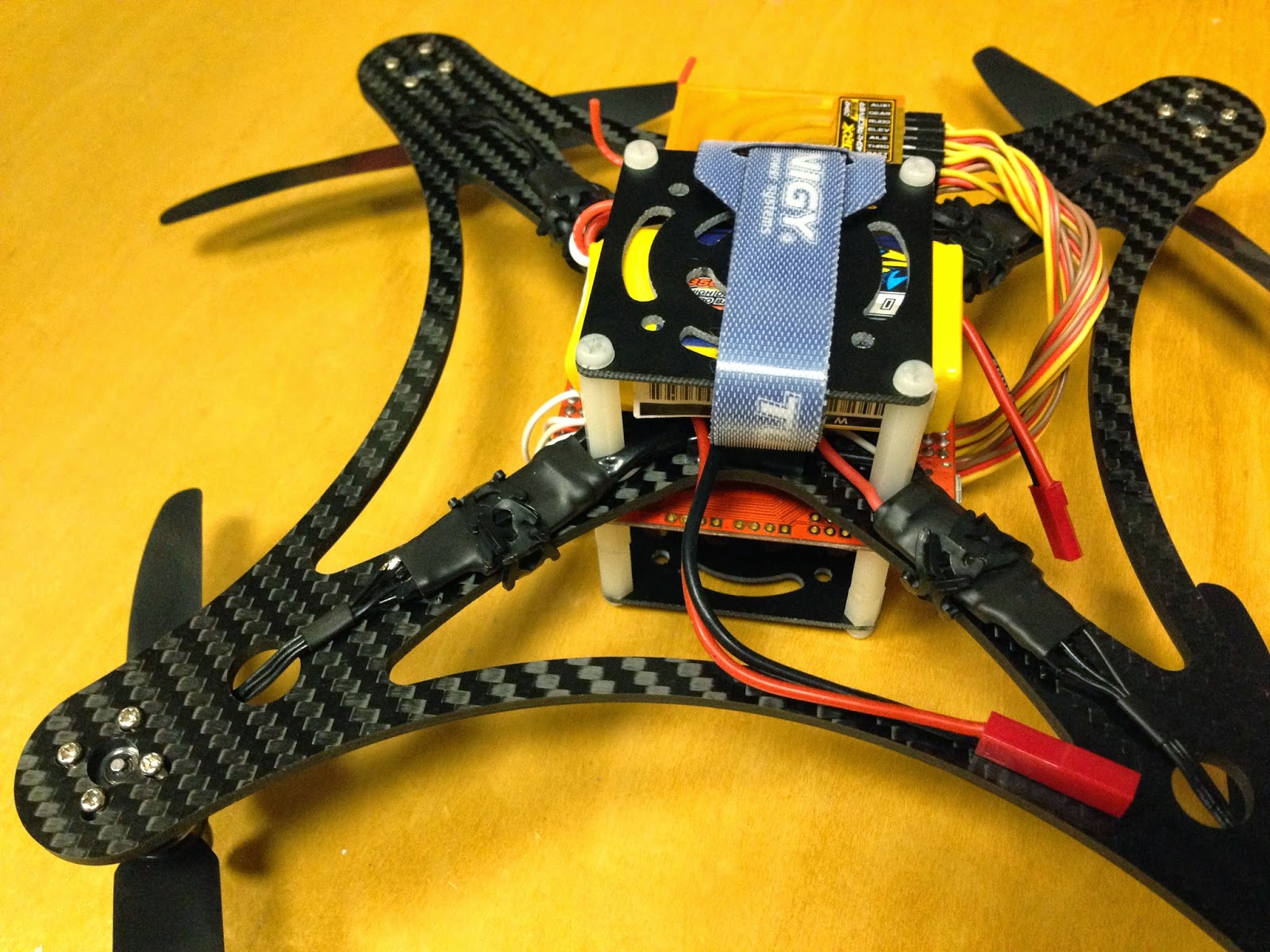
For a flight controller, I decided to try out the MultiWii Pro 2.0 from Hobby King. Turns out there is a new and improved model, so I don't recommend this, but it's cheap, comes with GPS and for acro flying, it works just fine. Newer models have replaced the BMPxxx barometer with the more accurate XXX (only needed for modes using alt hold) and the MTK GPS unit has been replaced with the Ublox-LEA-H. For now, I will leave off the GPS module until I need it. The top shelf I added is unnecessary, but gives protection to the FC.

I opted to use an Orange receiver from Hobby King. It is a very inexpensive rx, has a range of about a quarter of a mile (which is fine for this application) and binds to my Spektrum radio. Receiver is attached to the FC and now we can add a battery, arm the FC and spin up the motors to check the direction of each. Spinning up the motors verified that two of the motors, in fact, were spinning in the wrong direction. These were reversed (by disconnecting and resoldering any two of the three motor wires to the ESC.


One last thing to do with the ESCs (told you they were a PITA) is to calibrate them. Unlike some other flight controllers which allow you to calibrate the ESCs easily and all at once, the MultiWii Pro 2.0 seems to have no such feature to offer me. So the ESCs must be calibrated off the rx. One at a time, the ESC must be connected to the throttle pin on the rx. The radio and rx are turned on first and the throttle stick is set to full throttle. Then the ESC is powered up, wait for a beep (or two or three depending on the ESC). This designates full throttle. The move the throttle stick to zero throttle and wait for the beep (or two or three). You're done. Now repeat for the other three. I found it easier to build a rig so that I could calibrate all four ESCs simultaneously. This has the added benefit of ensuring that all four are in identical agreement as to what is zero throttle and what is full throttle. In order to pull this off, I used a breadboard. The breadboard bridged the four signal cables on all four while simultaneously providing power to the receiver from one of the ESCs. With the calibration of the ESCs complete, the ESCs and the rx are reconnected to the FC.


A shelf is added to the underside to act both as a battery tray and as a landing leg. This will protect the vehicle while it is on contact with the ground. Additionally, the receiver was attached to the underside of the frame (at the front) using double-sided tape.

 All ready to go and this little guy tips the scales with an AUW of 262g. The battery contributes about 50g to this so, without battery, this quad weighs 212g. It's slightly higher than the 200g I was aiming for, but we're close and this quad has really high end components in its drive system. Should be extremely agile at this weight - especially with 5-inch props. Also, if acro and stability modes are all you are after, then there are more lightweight FCs available that would work just fine. The 2,200mAh battery which I got for this quad weighs in at 134g. With this battery, the quad weighs in at 346g which is a little heavier than the 300g AUW that I wait aiming for. If necessary, we could always use a 1,600mAh which weighs in at 85g for an AUW of 297g. The difference in flight times between the two is about 2 minutes. Also, I have not yet added the GPS components which will likely add a few grams (about 5g) to the AUW.
All ready to go and this little guy tips the scales with an AUW of 262g. The battery contributes about 50g to this so, without battery, this quad weighs 212g. It's slightly higher than the 200g I was aiming for, but we're close and this quad has really high end components in its drive system. Should be extremely agile at this weight - especially with 5-inch props. Also, if acro and stability modes are all you are after, then there are more lightweight FCs available that would work just fine. The 2,200mAh battery which I got for this quad weighs in at 134g. With this battery, the quad weighs in at 346g which is a little heavier than the 300g AUW that I wait aiming for. If necessary, we could always use a 1,600mAh which weighs in at 85g for an AUW of 297g. The difference in flight times between the two is about 2 minutes. Also, I have not yet added the GPS components which will likely add a few grams (about 5g) to the AUW. 




















{kind=link}